建置網路拓樸還會有個問題:管理問題
因為拓樸包含的機器與網線如果沒有適當的整理,恐怕往後運維起來會很困難
所以我建置了簡易機櫃來放主機及網路設備
雖然非企業機房等級
但以個人來說,已經非常實用了
現在就來看看怎麼做吧!
我想我們要對網線做整理時,沒有光源應該非常難受吧?
但機櫃內空間狹窄,再放個手電筒照明真的有那麼一點不方便!
。
。
。
(圖片來源:網路)
這就是這次要裝進UNRAID網路拓樸的機櫃
為了解決燈光問題,我會加裝自動感應LED燈在此機櫃的兩側門旁
實現智慧/自動化的組件
WS2812B或 3PIN LED排燈*2 (長度各1m)
(圖片來源:網路)
PIR Motion Sensor*1 (型號HW416B)
WS2812B分別把黏在機櫃兩側門邊
HW416B接上樹梅派即可
這邊只需注意HW416B有兩個旋鈕以及焊點
功能分別為:
1.反應速率(停止偵測時會有多少秒的延遲)
範圍 5~300秒
2.可偵測距離
範圍 3~7公尺
3.焊點:預設為高電位觸發(也就是把H點做焊接)
即輸出1時讓WS2812B恆亮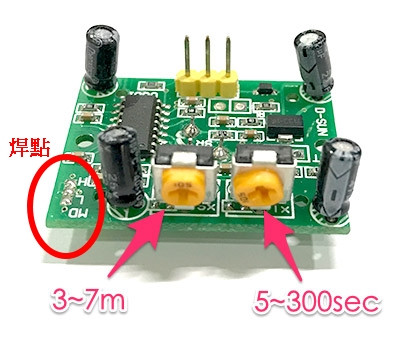
樹梅派4B - 4GB (Raspberry Pi OS x86)
目標要達到只要一開門偵測到有動靜,就立即把WS2812B恆亮;反之則關閉下面是我寫的程式碼,附上給大家依自身情況做修改:
import time
import RPi.GPIO as GPIO
# import 現成燈條套件
from rpi_ws281x import Color, PixelStrip, ws
#import PIR Motion
from gpiozero import MotionSensor
GPIO.setwarnings(True)
#定義PIR Motion
GPIO.setmode(GPIO.BCM)
Motion in pin
Motion_PIN = MotionSensor(16)
GPIO.setup(Motion_PIN, GPIO.IN)
#定義燈條相關參數
LED_COUNT = 30
LED_PIN = 18
LED_FREQ_HZ = 800000
LED_DMA = 10
LED_BRIGHTNESS = 255
LED_INVERT = False
LED_CHANNEL = 0
LED_STRIP = ws.SK6812W_RGBW
#定義變化響應時間 (這裡設置50ms)
def colorWipe(strip, color, wait_ms=50):
for i in range(strip.numPixels()):
strip.setPixelColor(i, color)
strip.show()
time.sleep(wait_ms / 1000.0)
if __name__ == '__main__':
# 燈條函數
strip = PixelStrip(LED_COUNT, LED_PIN, LED_FREQ_HZ, LED_DMA, LED_INVERT, LED_BRIGHTNESS, LED_CHANNEL, LED_STRIP)
strip.begin()
#輸出主程式
try:
while True:
time.sleep(0.1)
if Motion_PIN.when_motion:
colorWipe(strip, Color(0, 0, 0), 0)
print("CLOSE")
time.sleep(0.1)
elif Motion_PIN.when_no_motion:
colorWipe(strip, Color(255, 255, 255), 0)
print("OPEN")
time.sleep(0.1)
except:
print("error")
#中止程式時清除GPIO
finally:
GPIO.cleanup()



 iThome鐵人賽
iThome鐵人賽